
全要素、全场景高保真仿真测试:为“重感知、轻地图、纯视觉”NOA智驾系统保驾护航
在自动驾驶技术迈向城市复杂场景的进程中,“重感知、轻地图、纯视觉”的导航辅助驾驶(NOA)算法正成为行业焦点。然而,如何在确保安全性的前提下,高效验证算法在动态城市场景中的极限能力?IAE智行众维凭借全要素、全场景的高保真仿真测试环境,为纯视觉智驾系统提供从研发到落地的全链路验证支持,助力企业突破技术边界,抢占智驾新高地。
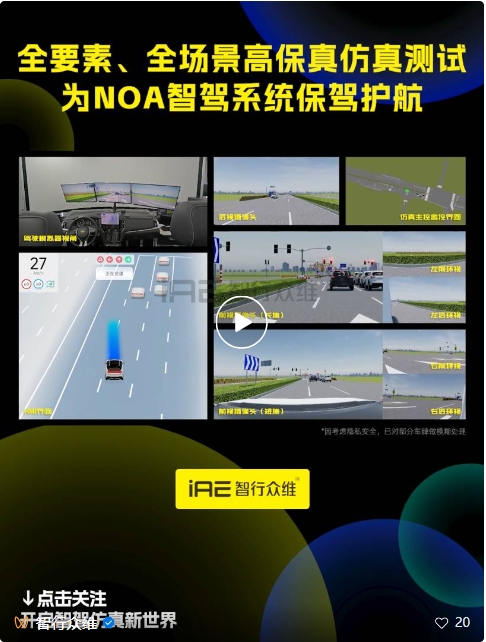
精准传感器模拟:还原真实视觉世界的每一帧
纯视觉NOA的核心在于“用摄像头代替人眼”,而仿真测试的基石是高保真传感器模拟。
基于真实车辆的多摄像头布局,精确模拟各摄像头的内参(焦距、畸变)与外参(安装位置、角度),确保仿真图像与实车数据空间对齐,为感知算法提供“零差异”输入。

为了进一步提高仿真的真实性,采用了先进的高保真物理渲染引擎来生成多传感器视角下的实时图像。这些图像视觉效果逼真,算法目标检测准确,极大地增强了整个系统的置信水平。

高保真仿真场景构建:城市复杂路况的1:1镜像
IAE智行众维以高精度数字孪生技术为核心,构建覆盖城市全要素的仿真场景库,为NOA算法提供无限逼近真实的测试战场。
– 道路拓扑复刻:从多车道十字路口、无保护左转区域到狭窄胡同、施工路段,精确还原车道线曲率、交通标志位置、路缘石高度等细节,解决“轻地图”模式下对实时感知的依赖挑战。
– 动态行为还原:得益于自然驾驶数据的积累,IAE“水木灵境”场景工场目标行为还原方面能够遵循真实世界场景特征,实现高置信度动态行为。
- 行人行为模拟:生成多样化的行人行为,包括突然横穿马路、闯红灯、逆行等。
- 非机动车模拟:还原自行车、电动车等非机动车的复杂行为,如突然变道、逆行、闯红灯等。
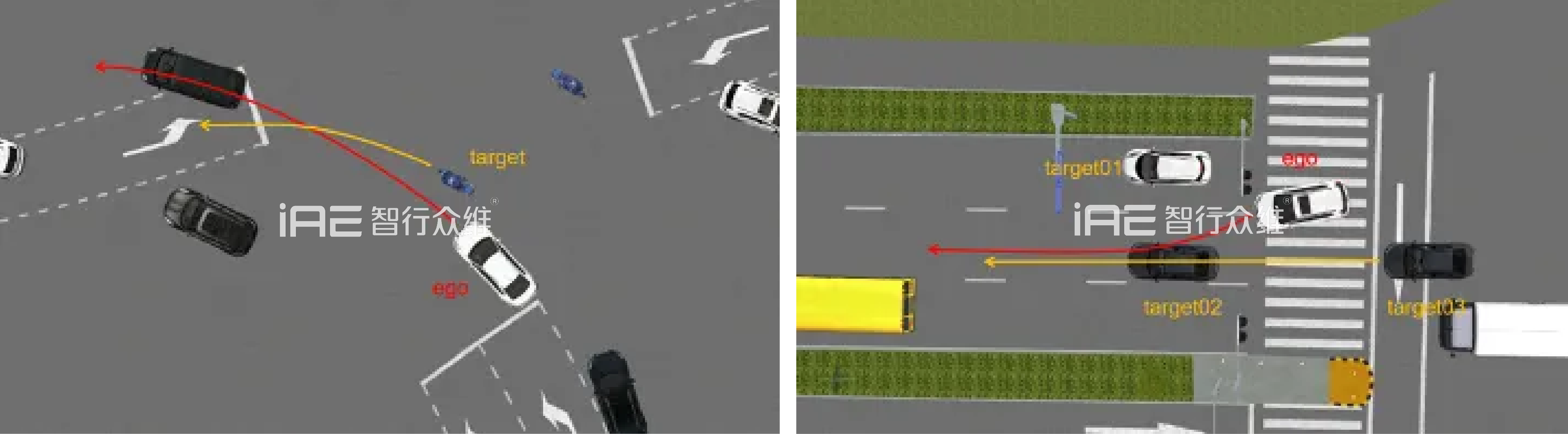
- 机动车行为模拟:模拟真实驾驶行为,包括加塞、违规变道、紧急制动、鬼探头(如车辆突然从盲区出现)等场景,引入博弈行为,如路口抢行、礼让行人等。

多元复杂场景覆盖:从功能实现到安全边界的全域验证
针对纯视觉NOA“轻地图”特性,IAE智行众维设计功能-安全-人机-特殊场景四维测试矩阵,直击算法能力短板:
– 功能实现测试:
- 测试算法在不同场景下的基本功能,如车道保持、自动变道、跟车、避障等。
- 验证算法在极端情况下的表现,如车辆突然切入、行人突然横穿、紧急车道关闭等。
– 安全边界压测:
- 模拟算法可能遇到的安全边界条件,如车道线模糊、交通标志缺失、传感器盲区等。
- 测试算法在传感器故障、数据丢失或延迟情况下的应对策略。
– 人机交互验证:
- 模拟驾驶员与系统之间的交互场景,如功能降级的提示和接管过程。
- 测试系统在异常情况下的提示与驾驶员的反应机制。
– 特殊场景覆盖:
- 施工区域:模拟道路封闭、车道合并、临时信号灯等场景,测试算法对临时交通标志和动态路障的识别与应对能力。
- 窄路场景:模拟双向单车道道路,测试算法在会车、超车等复杂场景下的决策能力。
- 城市交叉路口:模拟无信号灯的四路交叉路口,测试算法在无规则交通环境下的博弈与决策能力。
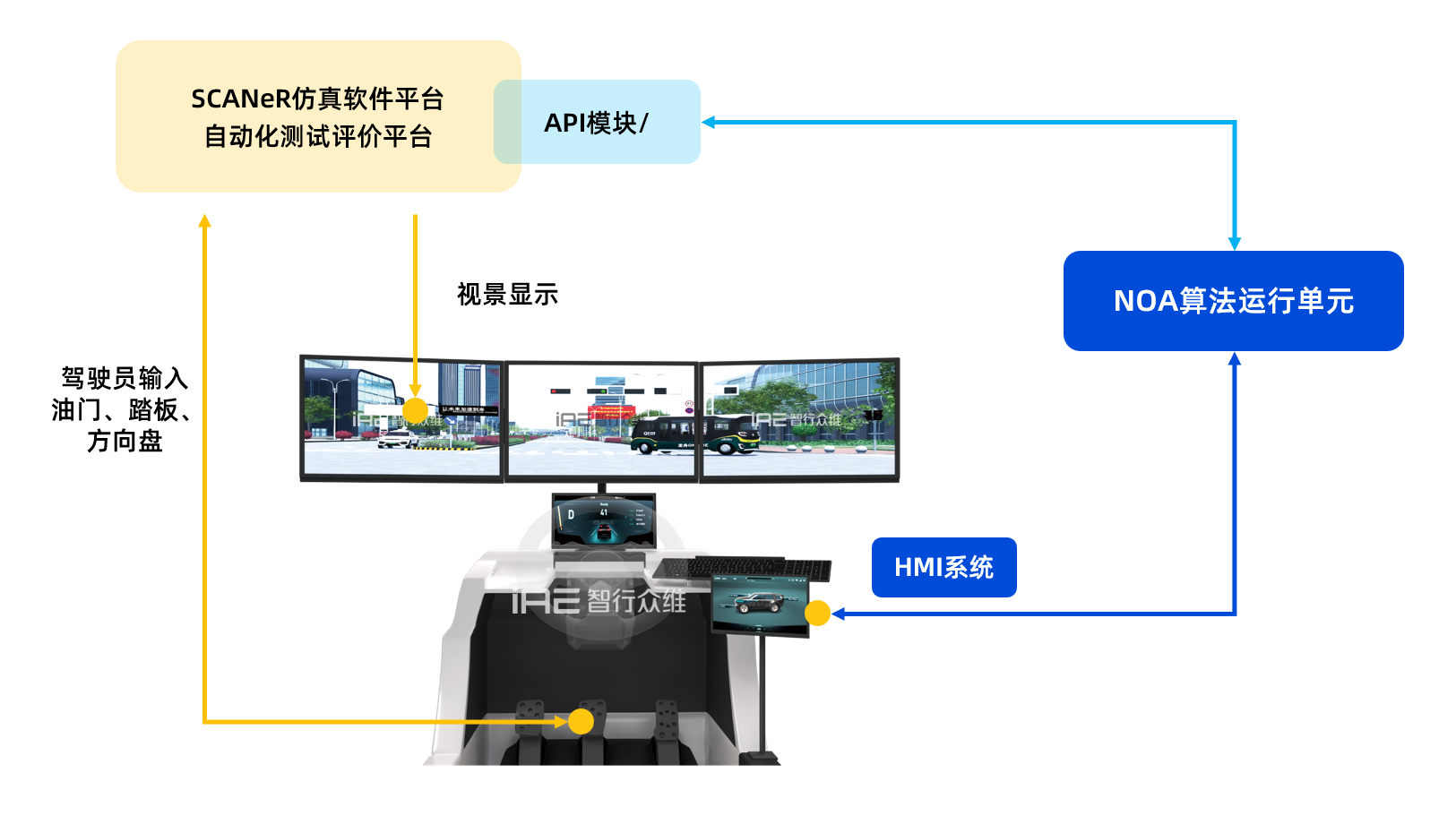
深度整合测试工具链:SIL/HIL/DIL全闭环赋能高效迭代
IAE智行众维打造“仿真-测试-评价-优化”一体化平台,服务智驾研发全链路。
将仿真引擎、驾驶模拟器、自动化测试评价平台、算法运行单元以及人机交互(HMI)系统整合到一个统一且高度集成的测试框架中,可以为智驾系统提供一个全面而高效的测试环境。通过这种方式,在实验室条件下针对导航辅助驾驶(NOA, Navigated On Autopilot)等功能进行测试时,不仅能够显著提升测试效率,还保证了测试结果的一致性和可重复性。
在“重感知、轻地图”的技术路径下,高保真仿真测试已成为纯视觉NOA落地城市复杂场景的“必选项”。IAE智行众维以全要素数字孪生、全场景覆盖、全链路闭环的解决方案,为车企与自动驾驶企业提供安全、高效、可扩展的仿真验证底座,助力中国智驾技术驶向城市NOA的无人区。